CodeLab DynamicTable: 一个可实施的技术方案
文章目录
我的命题可以用以下方式解释:了解我作法的人,会用这些命题当做梯子,越过它们,最终会发现这些梯子是荒谬的。他必须超越这些命题,之后才能正确的看待世界。 – 维特根斯坦 《逻辑哲学论》
前言
CodeLab DynamicTable: A Seeing World 可以看作 CodeLab DynamicTable 的白皮书。 文章里,我们着重阐述了想法的来源、设计原则以及可能性,尽管也站在技术视角做了一些讨论,却未给出完整的可实施技术方案。
本文则试着给出一个可实施的技术方案, 它包含硬件设备清单和源码细节。
需要强调的是,开放性和可扩展性是 CodeLab DynamicTable 的灵魂,大家可以随意改造它,构建自己想要的东西.我们也鼓励你为用户保留这种灵活性,让 Ta 自己成为创造者。
我们推荐将本文看作实施 DynamicTable 一个脚手架,而不是标准答案。将其视为一个帮助你爬上墙头的梯子,一旦爬上去之后,去做你自己想做的事情吧,不要拘泥于梯子本身。
第 0 号 CodeLab DynamicTable
CodeLab 目前有 4 张办公桌,3 个全职人员。我们将第 4 张桌子构建为 DynamicTable。

可以把这张桌子视为 第0号 DynamicTable。
我们在CodeLab DynamicTable: A Seeing World提到说, DynamicTable 的构成包括
- 铅笔
- 剪刀
- 纸张
- 橡皮泥
- 可打印的 Marker
- 摄像头
- 显示设备(超短焦投影仪)
- 桌子
- CodeLab Scratch
- CodeLab Adapter
- …
铅笔、剪刀、纸张、橡皮泥 是日常实物,不做讨论。
其中硬件/设备包括:
- 桌子
- 显示设备(超短焦投影仪)
- 可打印的 Marker
- 摄像头
软件包括:
- CodeLab Adapter
- CodeLab Scratch
接下来,我们站在实施的视角来讨论它们。
硬件/设备
桌子
我们采用了宜家的这款升降桌。
我们选择了橡木纹理表面,这个纹理表面在弱光下,挺适合直接作为投影表面。
它的尺寸信息是:
- 长度: 120 厘米
- 宽度: 80 厘米
选择这款升降桌的最初动机是: 来 CodeLab 参加编程活动的孩子身高不同。此外,它也支持我们站立办公。
需要说明的是: DynamicTable 对桌子没有特别要求。可以任意选择。如果它的表面纹理不适合投影,可以考虑铺一层桌布。
显示设备(超短焦投影仪)

我们选择了 LG 的这款超短焦投影仪: PH450UG,33cm 就可以获得 80 英寸的大屏幕。
它内置电池,续航超过 2.5 小时。
体积小巧(132 x 200 x 80.5 mm),单手可握。更详细的参数,参看产品页。
投影既可以是桌面,也可以投射到墙上。
可打印的 Marker

我们目前选择 ArUco 作为 Marker 。上图一共有 5x6 = 30 个 Marker, 按照从左到右,从上到下的顺序,Marker id 依次从 1 到 30。
你可以将 Marker 视为一种二维码,计算机可以识别它。计算机除了可以理解它的 id (编号)信息, 还可以理解它在什么位置,旋转角是多少,以及中心点和边缘 4 个角点在镜头下的坐标是多少。
它是一个携带空间信息的二维码。
ArUco Marker 在 AR 和 机器人领域都用得很广泛,是一个开放项目。
我们目前使用 OpenCV(Python)解析它。
CodeLab 已经构建了解析 ArUco Marker Adapter 插件,你可以在不了解它的情况下, 在 Scratch 中使用它。
如果你愿意深入学习 ArUco Marker,推荐学习MECARUCO: mechanics & aruco。
ArUco Marker 的类型
ArUco Marker 有多种类型, 我们选择了 4X4_50布局的, 一共有 50 个不同的 Marker。
如果选择7X7_1000 则一共有 1000 种不同的 Marker。
你可以在线查看它们之间的区别: arucogen, 也可以从以上页面生成可打印 Marker。
如何生成以及打印 Marker
有多种方式生成 Marker,既可以从 arucogen 每次生成一个 marker 。
也可以使用 Python 代码批量生成 marker:
生成以上 marker 的代码为:
|
|
每个 marker 多大合适呢?
这个可能需要通过做实验来获得。摄像头摆放的高度,以及分辨率, 都可能影响 marker 识别率。
我们目前在 A4 纸上以黑白模式打印 ArUco Marker,大小是这样的:
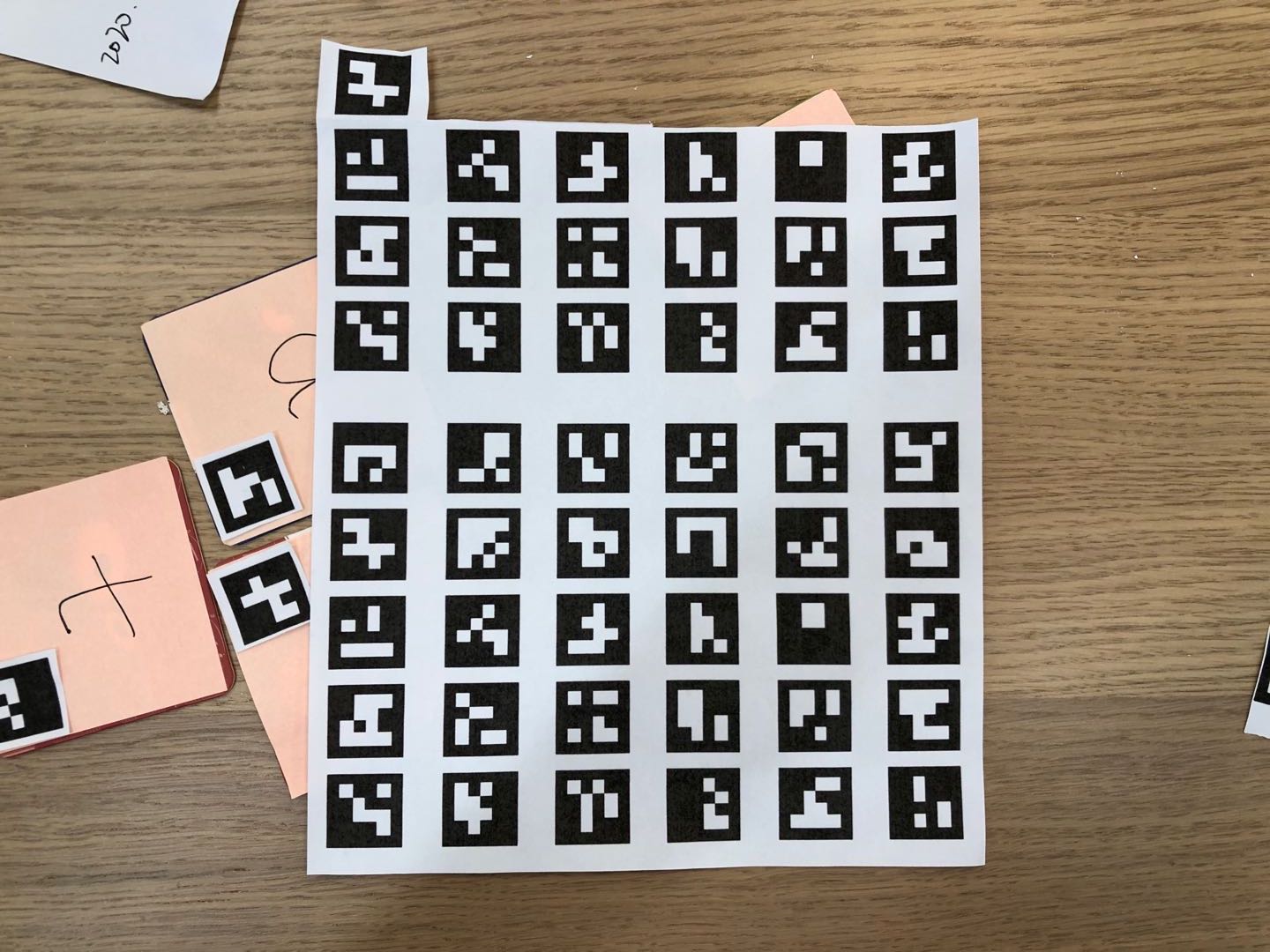
在一张 A4 纸上打印 2 份 30 张的 marker。
如果你想让 marker 更小,也是可以的,最好做一些实验,确保识别率。如果你愿意把 marker 打印得更大,请随意。
摄像头
我们选择了logitech C922PRO 摄像头, 支持分辨率 1080P 视频流。
选择这款摄像头是因为,我们准备在 CodeLab 办公室做直播。
DynamicTable 使用 Scratch 的视频数据(480x360), 这么低的分辨率对摄像头要求很低,所以绝大多数 USB 摄像头都可以。
为了保证灵活性,最好有一个摄像头活动支架:

以上便说完了 DynamicTable 的硬件/设备构成。
软件
CodeLab Adapter
使用 CodeLab Adapter 插件: node_physical_blocks.py, 我们可以解析摄像头所见到的 ArUco Marker ,并按照从左到右、从上到下的顺序依次列出 Marker id。
目前 node_physical_blocks.py 已经在插件市场中。
CodeLab Scratch
以下是一个简单的案例,识别出拼写单词:
按绿旗运行程序, 将开启摄像头,并运行 node_physical_blocks.py 插件,如果你是第一次运行 node_physical_blocks.py 插件,将自动安装依赖:opencv-contrib-python , 这个依赖比较大(> 60MB) ,耐心等待一会儿,依赖安装完成后,屏幕右上角会出现通知信息。
每次按下空格的时候,将分析摄像头画面,从中提取出 marker 信息,并在舞台区域显示识别到的 marker id 列表。(从左到右,从上到下)。
整个 Scratch 程序的逻辑是: 获取当前屏幕的 marker 数据(marker id),存放到 scratch 变量: markers 里;将 marker id 与 marker 的含义绑定到一起(诸如marker 2 表示字母 c)。如果屏幕中的 marker 拼成的字母是 cat,则触发猫叫声。
marker id 的含义是自定义的;拼写的结果要触发什么行为是自定义的。
只要将 Scratch-spell-demo 稍加修改,就可以作出以下视频里的案例。
以上只是一个非常简单的案例,发挥你的想象力,去做好玩的东西 :)
投影呢?
以上例子的输出只使用了声音,并未将交互动画投影到桌面。
将动画投影到桌面的想法是这样的: 最大化 Scratch 舞台,选一个黑色背景,将舞台区域之外的地方变黑(在最大化舞台区模式下,CodeLab Scratch支持切换到dark模式)。
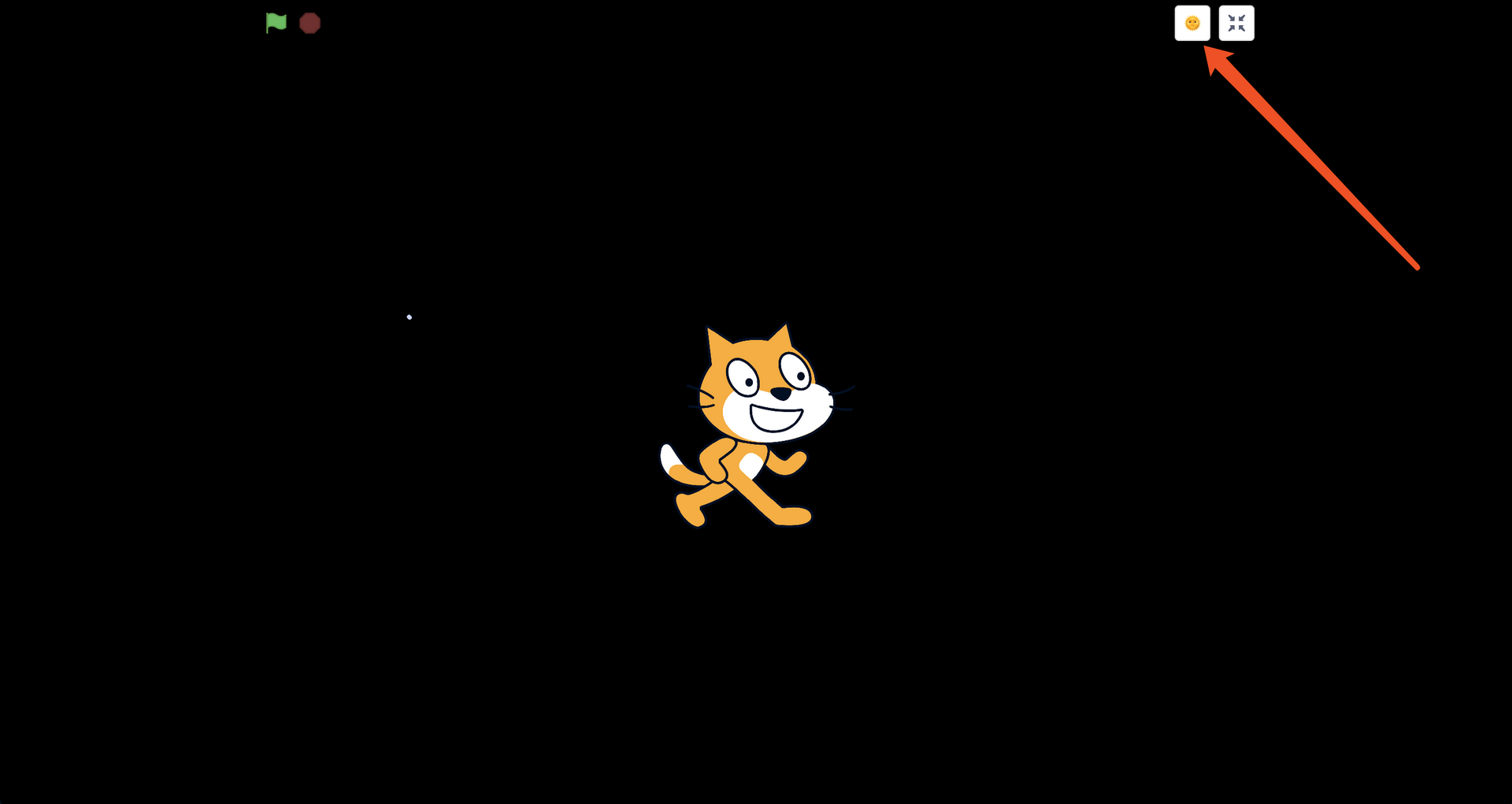
之所以要让角色之外的区域都变黑,是因为投影仪将黑色解释为没有光照, 如此一来我们就能让 Scratch 角色与桌子(环境)融为一体。
一旦理解这个想法,你就能自己制作各种有趣的沉浸式场景啦。
参考
文章作者 种瓜
上次更新 2020-06-02